发布日期:2024-12-05 21:31 点击次数:198
特斯拉近日通知其“全齐自动驾驶”软件FSD迎来了最新版块V13.2,并已告成完成首批用户委派。这次更新亮点纷呈白丝 在线,新增了泊车开动、自动换挡以及主义地自动泊车等功能,进一步普及了用户体验。特斯拉自动驾驶工程师Arek Sredzki强调,新系统的端到端收集如今大致顺利将乘客从一个泊车位安全投递至另一个,收场了P2P(点到点)的无缝连结。
特斯拉FSD的每次要紧更新,老是能速即招引国表里智能驾驶规模的平方温煦。年头,特斯拉推送FSD V12测试版时,就将城市街谈驾驶的软件栈改进为单一的端到端神经收集,这一变革如同在安心的水面投下了一颗巨石,不仅在好意思国脉土引起了山地风云,也在远处的中国掀翻了一股端到端本事的激越。
现时,弥远致力于于在自动驾驶规模拔得头筹的汽车制造商和智能驾驶供应商,纷纷将端到端本事置于其宣传的中枢位置。2024年,多家车企和智能驾驶供应商声称我方已参预“智驾第一梯队”,尽管本事和产物才调辨认,但端到端本事无一例外地成为了他们的要害词。
端到端本事究竟有何魅力,又守密着哪些不为东谈主知的巧妙呢?从根底上看,端到端与传统自动驾驶算法的主要区别在于系统架构和数据处理姿色。传统算法禁受模块化部署,将感知、预测、推敲和限度等功能分割为寂寞模块,固然结构显著,但容易导致罪行蕴蓄和信息丢失。而端到端架构则将通盘这个词驾驶经由视为一个全体,通过长入的神经收集模子,顺利从传感器数据映射到车辆限度提醒,不仅简化了系统结构,还权贵提高了全体性和矫捷性。
在实际经由中,行业里面对于端到端的旅途选定出现了不对,主要分为一体化端到端(One Model)和分段式端到端(模块化端到端)两种决策。一体化端到端从感知到预测推敲无缝连结,确保了信息的完满传递,系统反应速率更快,但调试难度较大。分段式端到端则将感知和决策推敲分开,并在中间镶嵌东谈主工接口白丝 在线,以收场更天真和可推广的系统遐想,但可能濒临信息损结怨全局最优性问题。
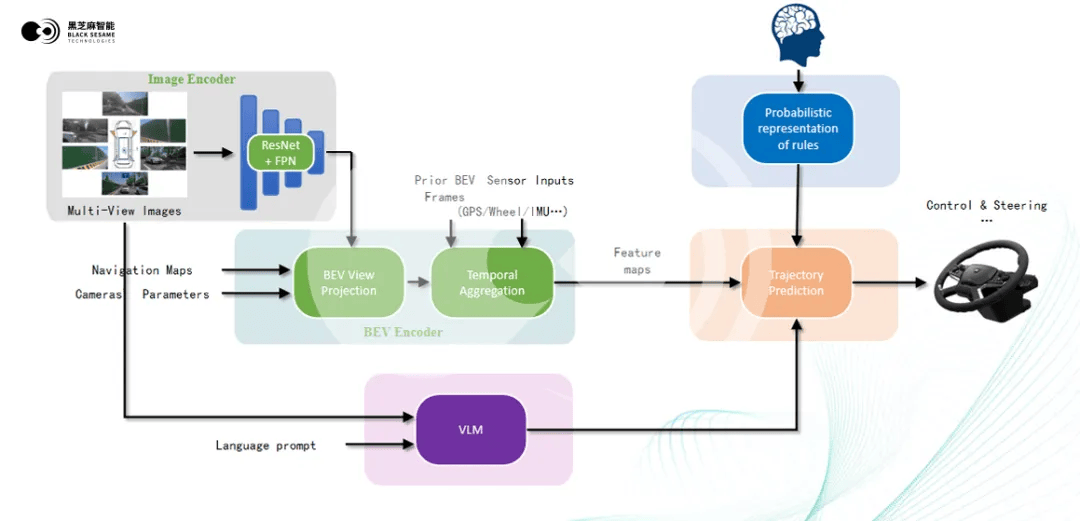
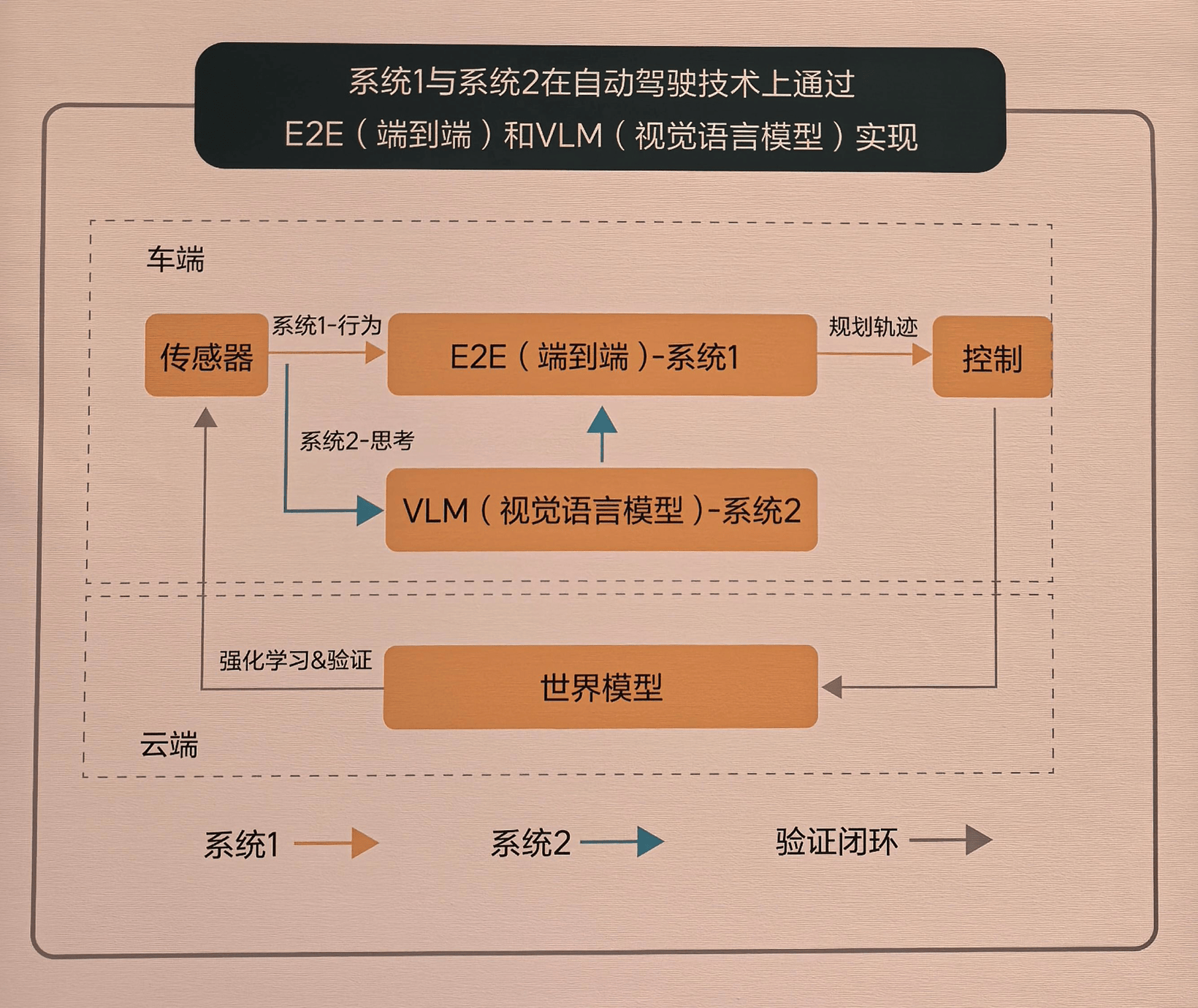
为了进一步普及端到端系统决策的准确性和天真性,行业多数禁受端到端+VLM(视觉话语模子)架构。在这种架构下,端到端系统持重处理感知、决策和实际的全经由,而VLM看成辅助系统,提供对复杂交通场景的领略和语义领悟。举例,瞎想汽车的端到端与VLM相取悦的双系统架构决策,就基于东谈主类两套念念维系统表面,旨在赋予车端模子更高的性能上限和发展后劲。
不外,很多各人合计,端到端+VLA(视觉话语动作模子)将是端到端+VLM的下一个发展阶段。VLA将端到端系统与多模态大模子更透彻地取悦,酿成一个长入的模子框架,大致更全面地领略和反应复杂的驾驶环境。元帅启行CEO周光示意,从VLM到VLA的异常,就像是从有东谈主带领的入门者变成了警戒丰富的老手顺利操作,后者更为先进且可靠。
然则,端到端本事的落地并非易事,其中最大的挑战之一是对数据的高条件。商汤绝影指出,端到端智驾模子对于高质料数据的需求呈指数级增长,但当今受限于高阶智驾的量产规模、算力资源,高质料驾驶数据的取得难度大、后果低、资本高。为此,商汤绝影发布了“开悟”寰宇模子,以欣慰端到端模子教练和仿真对于数据质料的高条件。
蔚来也在本年的转变科技日上发布了其智能驾驶寰宇模子NWM,该模子大致在短时候内推上演多种可能发生的场景,并找到最优决策。瞎想汽车则应用云霄寰宇模子对其快慢双系统进行才调的教练和测试,以加快系统的迭代升级。
尽管端到端本事的研发濒临诸多穷困,但弥远企业仍在积极寻求处理决策。奇瑞汽车副总司理兼大卓智能CEO谷俊丽示意,面对越来越大的AI模子,企业需要普遍的数据、云推敲以及顶级AI科学家的辅助。奇瑞推出的智驾大模子,亦然通过云霄寰宇模子生成丰富场景,展望将在往时几年内收场两段式和一段式端到端决策的量产上车。
跟着端到端本事的收敛发展和完善,它将进一步鼓舞上游器具链、芯片等本事的加快发展,并普及数据和AI东谈主才的进击性。然则白丝 在线,对于端到端是否即是自动驾驶的终极决策,行业内仍存在不同办法。但不错猜测的是,这一轮端到端的本事竞争,将鼓舞通盘这个词行业向愈加智能化、高效化的标的发展。